This project is the third version of an industrial controller board designed for robotic welding systems. The board is based on an STM32F4 microcontroller and developed to operate reliably in harsh industrial environments with high electromagnetic noise.
The main focus of this design is signal isolation, high-speed I/O, and robust industrial communication interfaces.
Robotic welding environments are characterized by:
High electromagnetic interference (EMI)
Ground potential differences
Fast digital signals interacting with power electronics
The goal of this project was to design a central control board capable of maintaining stable and reliable operation in such conditions, while providing flexible, isolated interfaces for sensors, actuators, PLCs, and external control systems.
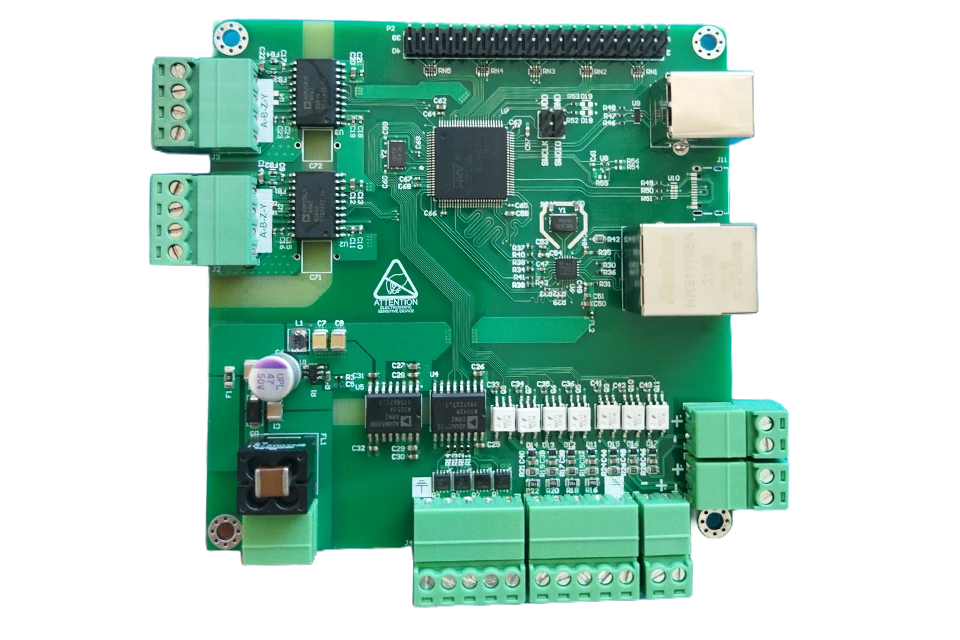
STM32F4 microcontroller
Suitable for real-time control tasks
Rich peripheral set for simultaneous communication and I/O handling
The STM32F4 was selected due to its balance of processing performance, reliable real-time behavior, and availability of multiple communication interfaces required in industrial systems.
4× high-speed isolated NPN outputs
4× high-speed isolated digital inputs with common reference
2× isolated differential digital inputs
Full galvanic isolation of I/O signals improves system safety, reduces noise coupling, and protects the controller from voltage transients and ground loops commonly present in welding systems.
2× isolated RS485 ports
Configurable to operate in RS422 mode
10/100 Mbps Ethernet interface
USB interface for direct connection to a PC
The isolated RS485/RS422 interfaces enable reliable communication with PLCs and industrial devices even in the presence of significant ground potential differences.
16-bit parallel data bus
Dedicated control signals
Designed for future expansion modules or custom external interfaces
This parallel bus allows the controller to be extended with application-specific hardware without redesigning the core control board.
24V industrial power input
Integrated input noise filtering
Designed for operation in high-noise industrial environments
Special attention was given to power integrity and filtering to ensure stable operation near welding equipment and power electronics.
Complete schematic and PCB design
Manufactured and tested hardware
Ready for integration into robotic welding systems
Improved system reliability in noisy industrial environments
Enhanced electrical safety through full signal isolation
Flexible architecture suitable for system expansion and future upgrades
This board serves as a robust control core for industrial robotic welding applications.
System architecture design
Component selection
Schematic and PCB design
Consideration of industrial noise, isolation, and reliability requirements
Custom industrial controller and embedded hardware design
Feel free to get in touch for collaboration or project inquiries.
